U.S. Department of Transportation
Federal Highway Administration
1200 New Jersey Avenue, SE
Washington, DC 20590
202-366-4000
Federal Highway Administration Research and Technology
Coordinating, Developing, and Delivering Highway Transportation Innovations
 |
| This report is an archived publication and may contain dated technical, contact, and link information |
|
Publication Number: FHWA-HRT-04-134
Date: December 2005 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Enhanced Night Visibility Series, Volume III: Phase II—Study 1: Visual Performance During Nighttime Driving in Clear WeatherPDF Version (859 KB)
PDF files can be viewed with the Acrobat® Reader® CHAPTER 2—METHODSPARTICIPANTSThirty individuals participated in Study 1. Participants were divided into three different age categories: 10 participants were between the ages of 18 and 25 (younger category of drivers), 10 were between the ages of 40 and 50 (middle-aged category of drivers), and 10 were over 65 (older category of drivers). Five males and five females comprised each age category. Participation was allowed after a screening questionnaire was completed and only if the selection conditions were fulfilled (appendix A). Participants had to successfully comply with the following: (1) sign an informed consent form (appendix B), (2) present a valid driver’s license, (3) pass the visual acuity test (appendix C) with a score of 20/40, uncorrected or corrected, or better (as required by Virginia State law), and (4) have no health conditions that made operating the research vehicles a risk. Participants were instructed about their right to freely withdraw from the research program at any time without penalty. They were told that no one would try to make them participate if they did not want to continue. If they chose at any time not to participate further, they were instructed that they would be paid for the amount of time of actual participation. All data gathered as part of this experiment were treated with complete anonymity. Participants received 20 dollars per hour for their participation. EXPERIMENTAL DESIGNA mixed-factor design was used for the data collection during the onroad portion of the study (i.e., different detection and recognition tasks). There were three independent variables: (1) VES configuration, (2) age, and (3) type of object. The between-subjects variable of the experiment was age. The within-subject variables were VES configuration and type of object. Table 1 and table 2 present a representation of the experimental design; a detailed explanation of each of the independent variables of interest follows.
INDEPENDENT VARIABLESAgeThe age factor had three levels: younger participants (18 to 25 years), middle-aged participants (40 to 50 years), and older participants (65 years or older). These age groups were created based on literature review findings (ENV Volume II) that suggest changes in vision during certain ages. (See references 1, 2, 3, 4, and 5.) Each age group comprised five males and five females. Gender was used as a control but not as a factor of interest. VESThe following list defines the VES configurations for Study 1:
More in-depth technical specifications for each headlamp appear in ENV Volume XVII, Characterization of Experimental Vision Enhancement Systems. The presentation orders for each VES and object combination were counterbalanced. Table 3 provides an example of the VES configuration order for a pair of participants. The first column, labeled “Order,” indicates the order in which the VESs were presented. The second column, labeled “VES,” presents the actual configuration that was performed. The third column, labeled “Vehicle,” presents the vehicle upon which the headlamps were mounted, either a sedan, pickup truck, white sports utility vehicle (SUV), or black SUV.
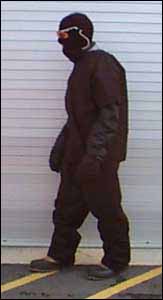
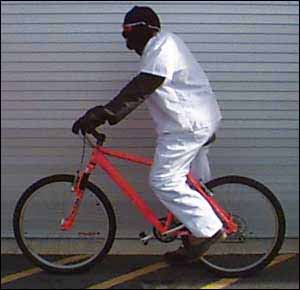
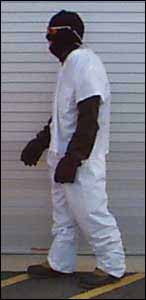
The 12 VES configurations tested were selected based on several considerations. The HLB and the HID headlamps are currently available on the market and reflect the most commonly used headlamps (HLB) and a growing section of the market (HID). Therefore, they were added as two of the configurations to allow the comparison of new VES alternatives with what is readily available. There was also some concern about the possible effect of changes in the detection and recognition distances because of the use of high profile headlamps (e.g., halogen of a sport utility vehicle) versus lower profile headlamps (e.g., halogen of a regular passenger vehicle). All of the configurations that use the UV–A headlamps had to be paired with HLB and HID headlamps because UV–A headlamps provide minimal visible light. These UV–A headlamps stimulate the fluorescent properties of objects contacted by the UV radiation, producing visible light. Their purpose is to supplement the regular headlamps, not to eliminate their use. The UV–A and HLB/HID pairings resulted in six different UV configurations: three in which the pairing was made with HLB lamps and three in which HID lamps were used. The three UV configurations inside each pairing category resulted from the use of three different forms of UV headlamp configurations: five UV–A, three UV–A, or hybrid UV–A headlamps. The hybrid UV–A headlamp is an experimental prototype that has a significant amount of visible light, although it is still not enough light to allow driving without low beam headlamps. The UV–A headlamps (used for the five UV–A and three UV–A configurations) produce less visible light. The HHB configuration was included to compare detection and recognition distances with the other VESs of interest in this study with a commonly available halogen headlamp in a high beam position. In addition, a new alternative to the HLB that provides the driver with more visible light output in a low beam configuration (HOH) was considered. The IR–TIS was included because of its ability to present the driver with images of the environment based on the temperature differential of objects. This approach has the potential to allow for very early detection of pedestrians, cyclists, animals (i.e., objects generating heat) or infrastructure objects that shed heat (e.g., guard rails, light posts) on the roadway. The objects selected for this study were pedestrians, cyclists, and static objects. The main reason for including the pedestrians and cyclists was because of the high crash-fatality rates for these nonmotorists.(6,7) Real pedestrians and cyclists were used to evaluate the effects of object motion on detection and recognition distances. Although pedestrian mockups have been used in previous research of this type,(8) actual pedestrians and cyclists seemed more appropriate, especially for understanding the effects of motion as a cue for detection. Moreover, the use of mockups would have improperly restricted the performance capabilities of VESs that use temperature characteristics of the object of interest and would have limited the external validity of this study. ObjectPedestrians and cyclists were presented to the drivers at two different contrast levels: (1) with black clothing against a clear night background and (2) with white clothing against a clear night background. Table 4 describes each of the nine objects of interest. The pedestrians were either static on the side of the road (i.e., representing a pedestrian who is waiting to cross the road) or dynamic. The dynamic pedestrians were walking in two different directions: (1) perpendicular to the vehicle path, representing a pedestrian crossing the road; and (2) parallel to the vehicle path, representing a pedestrian walking along the shoulder. Two objects other than pedestrians or cyclists were also used: a child’s bicycle and tire tread. The child’s bicycle was a 25-cm (10-inch) bicycle, and the tire tread was obtained from a 71- by 23-cm (28- by 9-inch) steel-belted truck radial tire. The tire tread was selected because of its potential for very low detection distances, which often leads to last moment object-avoidance maneuvers. The child’s bicycle was intended to represent the possible presence of a child in the area. Figure 1 through figure 6 show the objects presented in this study.
OBJECTIVE DEPENDENT VARIABLESDetection and Recognition DistancesDetection and recognition distances were obtained to analyze the degree to which the different VES configurations enhanced nighttime visibility while driving. These two variables were selected due to their common use and acceptance in the human factors transportation literature. (See references 9, 10, 11, 12, and 13.) Both terms, detection and recognition, were explained to the participants during the training session. Detection was explained as follows: “Detection is when you can just tell that something is on the road in front of you. You cannot tell what the object is, but you know something is there.” Recognition was explained as follows: “Recognition is when you not only know something is there, but you also know what it is.” During training and practice, the participants were instructed to press a button on a hand-held wand when they could detect an object on the road. The participants performed a second button press when they could recognize the object. The in-vehicle experimenter performed a third button press when the object of interest was aligned with the driver (i.e., the participant drove past the object). Detection and recognition distances were calculated from distance data collected at each of these three points in time. SUBJECTIVE RATINGSSubjective ratings were also collected as dependent variables. Participants were asked to evaluate a series of seven statements for each VES using a seven-point Likert-type scale. The two anchor points of the scale were “1” (indicating “Strongly Agree”) and “7” (indicating “Strongly Disagree”). The statements addressed each participant’s perception of improved vision, safety, and comfort after experiencing a particular VES. Participants were asked to compare the VES that they were evaluating at a given point in time with their “regular headlights” (i.e., the headlamps on their own vehicle). The assumption was made that the participants’ own vehicles represented what they knew best and, therefore, were most comfortable using. Following are the statements used for the questionnaire. Note that while the word “headlamp” is used throughout the ENV series, the subjective questions posed to the participants used the synonymous word “headlight,” as reflected below.
SAFETY PROCEDURESSafety procedures were implemented as part of the instrumented-vehicle system. These procedures were used to minimize possible risks to participants during the experiment. The safety measures required that: (1) all data collection equipment had to be mounted such that it, to the greatest extent possible, did not pose a hazard to the driver in any foreseeable instance; (2) participants had to wear the seatbelt restraint system anytime the car was on the road; (3) none of the data collection equipment could interfere with any part of the driver’s normal field-of-view; (4) a trained in-vehicle experimenter had to be in the vehicle at all times; and (5) an emergency protocol had to be established before testing. The pedestrians and cyclists on the road were trained about when to clear the road, based on a preset safety-envelope mark. In addition, they were provided with radios in case the in-vehicle experimenter needed to communicate with them. APPARATUS AND MATERIALSOnroad driving was conducted using four vehicles. The experimental vehicles included two sport utility vehicles, a pickup truck, and a luxury passenger vehicle. All vehicles were equipped with an electronic odometer. The measuring device was connected to a laptop computer that was equipped with software specifically developed for this study. The software allowed the experimenter to mark locations and record whether the trial was successful (figure 7). The software was developed to gather distance data from the driver and the passenger (if needed). Only the driver portion of the software was used for Study 1. The software gathers information such as the participant’s age and gender as well as the identification number assigned to that participant. In addition, it shows the object order that the participant was presented during a given VES configuration. Figure 7. Diagram. Data collection display screen. The VESs were distributed among the different vehicles. Most vehicles had light bars that allowed the headlamps (i.e., HLB and HID) to be switched out, thereby maintaining a more consistent horizontal and vertical position among the different VESs (figure 8 through figure 11). The HLB–LP and IR–TIS served as the only exceptions because they were installed by the factory. Smart RoadThe Virginia Smart Road (overhead lighting turned off) was used for the onroad study (figure 12 and appendix G). For Study 1, six different locations on the Smart Road were used to present the different objects (figure 13). The participants changed vehicles on the turnaround next to the entrance to the Smart Road. One onroad experimenter was assigned to each participant; this experimenter was responsible for escorting the participant to the next vehicle, showing him or her the location of different controls, and verifying that the correct VES configuration was being tested. Four other onroad experimenters were positioned at various locations. One onroad experimenter was assigned to locations 1 and 5, one to locations 2 and 4, and one to locations 3 and 6. See appendix I for more details on the protocol for the onroad experimenters. A total of six onroad and two in-vehicle experimenters were part of the study each night. Figure 12. Photo. Smart Road. Headlamp AimingThe headlamps used for the HLB, HID, HOH, HHB, and UV–A configurations were located on external light bars. To change from one configuration to another, researchers moved the HLB and HID headlamps onto, off of, and between vehicles. Each light assembly movement required a re-aiming process, which took place before starting the experimental session each night. At the beginning of the Phase II studies, a headlamp aimer was not available to the contractor, so an aiming protocol was developed with the help of experts in the field. (See references 14, 15, 16, and 17.) The details of the aiming protocol used for this specific study are described in appendix J. During the photometric characterization of the headlamps, it was discovered that the position of the maximum intensity location of the HLB, HOH, and HHB configurations was aimed higher and more toward the left than typically specified. This aiming deviation likely increased detection and recognition distances for the HLB and HOH configurations and likely decreased them for the HHB configuration. Details about the aiming procedure and the maximum intensity location are discussed in ENV Volume XVII, Characterization of Experimental Vision Enhancement Systems.
EXPERIMENTAL PROCEDUREThe experiment consisted of three sessions, each lasting about 3.5 h. The first session included a screening, laboratory training, and IR–TIS training. The other two sessions involved the two nights of the experiment at the Smart Road; two participants performed the experiment simultaneously. During the first onroad session, the participant was familiarized with the Smart Road and the experimental objects before starting the experiment. Six VES configurations were presented to the participants during the first onroad session and the remaining six configurations were presented during the second session. The order was counterbalanced. Following is a description of procedure details. Participant ScreeningParticipants were initially screened in telephone interviews (appendix A). If a participant qualified for the study, a time was scheduled for testing. Participants were instructed to meet the experimenter at the contractor facility. After each participant arrived, he or she received an overview of the study. Subsequently, each participant was asked to complete the informed consent form (appendix B) and take an informal vision test for acuity using a Snellen chart, a contrast sensitivity test, and a color vision test (appendix C). The vision test was performed to verify that all participants had at least 20/40 vision, corrected or uncorrected, and to identify any type of vision disparity that might have influenced the results. After completing these steps, and if no problems were identified, each participant received training on the experimental tasks to be performed during the drive. A detailed experimenter protocol for vision testing is included in appendix D. TrainingEach participant was instructed on how to perform the tasks associated with the object detection and recognition and how the questionnaires would be used. The study protocol and pictures of the objects were presented at this point (appendixes E and F). The detection and recognition definitions, the use of the pushbutton for detection and recognition, and the Likert-type scales for the questionnaire were also shown and explained to each participant. The training presentation outlined the procedures, showed pictures of the objects, and allowed for questions. The purpose of this lab training and practice was to allow all participants to begin the experiment with a standard knowledge base. After the lab training, practice using the heads-up display (HUD) that presents images captured by the infrared thermal imaging system (IR–TIS) took place. Examples of the objects shown during the experimental sessions were presented as part of the training practice. FamiliarizationBecause the participants were changing vehicles as part of the study, the familiarization process took place as soon as they reached each experimental vehicle. While the vehicle was parked, the onroad experimenter reviewed general information concerning the operation of the test vehicle (appendix K). Each participant was asked to adjust the vehicle seat and steering wheel position controls for his or her driving comfort. When the participant felt comfortable with the controls of the vehicle, the experiment was ready to start. Driving InstructionsParticipants were instructed to remain in the right-hand lane while driving and place the vehicle in park upon reaching each of the turnarounds. Participants were instructed to drive at 40 km/h (25 mi/h) during the experimental sessions and follow instructions from the in-vehicle experimenter at all times. Driving and Practice LapEach participant drove down the road to become familiar with the road and the vehicle; no objects were presented during this familiarization. At the bottom turnaround, the experimenter gave the wand with the pushbutton to the participant and instructed the participant that the purpose of this portion of the session was to familiarize him or her with the objects. The participant then drove back up the road for a practice run of detection and recognition, obtaining feedback from the experimenter as needed. After the practice tasks, the participant drove with the first group of six VESs, corresponding to the order assigned for the first night. General Onroad ProcedureDistance data were collected while the participant drove with each VES. The in-vehicle experimenter provided the participant with a pushbutton wand to flag the data collection program at both detection and recognition. Other than detection, recognition, and maintaining 40 km/h (25 mi/h), the participants performed no other tasks while driving. The experimenter sat in the passenger seat and let the participant know when he or she could start driving and where to park. The in-vehicle experimenter also administered the subjective questionnaires after each VES configuration and controlled the data collection program. Appendix F contains details on the in-vehicle experimenter protocol. Sequence of Data CollectionEach of the participants followed the same sequence of events to collect the data for each of the VES configurations. This sequence was as follows:
The study was performed twice every night (i.e., first shift: 7:45 p.m. to 11 p.m.; second shift: 11:30 p.m. to 2:30 a.m.). Participants who worked until late and usually drove late at night drove in the second shift to minimize the possibility of fatigue. Other participants drove during the first shift. Payment for the total number of hours (training, experimental session one, and experimental session two) was provided at the end of the second experimental session. Data AnalysisData for this research were contained in one data file per VES configuration per participant. All the data collected for the 30 participants were merged into a single database that included objective and subjective data. The data were evaluated to examine drivers’ visual performance under each of the different treatments. An analysis of variance (ANOVA) was performed. PROC ANOVA was used in SAS® statistical software to compute the ANOVA. The full experimental design model was used in the data analysis (table 5).
The ANOVA was used to evaluate whether there were significant differences among the different VESs in terms of dependent variables. The main effects that characterized this study were VES configuration (VES), driver’s age (Age), and type of object (Object). A Bonferroni post hoc analysis was performed for the significant main effects (p < 0.05). For the significant interactions, the means and standard errors were graphed and discussed. Post hoc analyses assisted in the identification of experimental levels that were responsible for the statistical significance of the main effect. Note that a significant main effect, or interaction, does not make all levels inside it significantly different. A detailed discussion of post hoc tests appears in Winer, Brown, and Michels.(18)
|