U.S. Department of Transportation
Federal Highway Administration
1200 New Jersey Avenue, SE
Washington, DC 20590
202-366-4000
Federal Highway Administration Research and Technology
Coordinating, Developing, and Delivering Highway Transportation Innovations
 |
| This report is an archived publication and may contain dated technical, contact, and link information |
|
Publication Number: FHWA-HRT-04-144
Date: December 2005 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Enhanced Night Visibility Series, Volume XIII: Phase III—Study 1: Comparison of Near Infrared, Far Infrared, High Intensity Discharge, and Halogen Headlamps on Object Detection in Nighttime Clear WeatherPDF Version (1.01 MB)
PDF files can be viewed with the Acrobat® Reader® CHAPTER 4—DISCUSSIONApproximation of stopping distances provides a method of scaling detection and recognition distances according to what is necessary for nighttime driving. This section first presents approximation of stopping success for each of the scenarios across all of the VESs. The stopping distance approach used here is the same as was presented in ENV Volume III, Visual Performance During Nighttime Driving in Clear Weather. Next, a summary of the performance of each of the VESs is provided, with comparisons primarily to the baseline HLB VES. Following these summaries for the different VESs, a discussion is provided regarding areas of particular interest for each VES. This includes a more detailed discussion of points such as age-related findings and items specific to the IR vehicles. As mentioned in the chapter 2, Methods, the aiming protocol used for this study resulted in a deviation in the location of maximum intensity from where it typically is for the HLB baseline headlamp. Details about this deviation are discussed in ENV Volume XVII, Characterization of Experimental Vision Enhancement Systems. As a result of the headlamp aiming, the detection and recognition distances likely increased for the HLB configuration. It is important to consider the results presented in this study in the context and conditions tested. If different halogen headlamps or aiming methods had been used, different results might have been obtained. STOPPING DISTANCESWhile the detection and recognition distances discussed to this point provide an indication of the advantages of one vehicle over another, they fail to describe any potential safety benefits or concerns based on VES use; however, with a limited number of assumptions, the VES-specific detection distances in clear weather conditions can be compared against various speed-dependent stopping distances. For consistency, time-to-collision will be presented as “distance-to-collision,” or stopping distance, for direct comparisons to the detection distances from the current study. Stopping distance is the sum of two components: (1) the distance needed for the braking reaction time (BRT) and (2) braking distance (table 22). Braking distance is the distance that a vehicle travels while slowing to a complete stop.(10) The results from driver braking performance studies suggest that the 95th percentile BRT to an unexpected object in open road conditions is about 2.5 s. (See references 11, 12, 13, and 14.) The equation for braking distance (dDB) is calculated in the equation in figure 59: Figure 59. Equation. Braking distance approximation. This equation assumes an acceleration (g) of 9.8 m/s2 (32.2 ft/s2), a final speed of zero, a coefficient of friction (f) between the tire and the pavement of 0.6, and a straight, level roadway (gradient G = 0 percent). The final equation appears in figure 60, including distance for brake reaction time and braking distance. Figure 60. Equation. Distance for brake reaction time and braking distance. Here, distance (d) is in meters or feet, velocity (V) is in m/s or ft/s, and acceleration (g) is in m/s2 or ft/s2. The coefficient of friction used for these calculations is based on Lindeburg (1992) (15) data for dry surface conditions. The data obtained from Lindeburg (1992) is comprehensive in terms of type of surface, condition of the tires, and speed. A mean value of 0.65 was obtained for the coefficient of friction for dry surfaces (across all dry conditions). To accommodate for most types of vehicles (braking capabilities), a conservative approach was taken, and 0.60 was used as the coefficient of friction for the calculations. Using this approach, stopping distances were calculated at a range of speeds (table 22).
The calculations in table 22 represent a simple and ideal condition, but they allow for some visualization of the VESs’ capabilities. These stopping distances can be used as a measure of the VESs’ ability to provide enough time to detect, react, and brake to a stop at different speeds, but only with some caveats. First, in this study, distances were obtained while drivers were moving at approximately 40 km/h (25 mi/h), and their ability to detect objects will not necessarily remain the same as speeds increase. Second, systems that are currently close to the stopping distance or that need a larger stopping distance might quickly become less effective when conditions such as wet pavement, worn tires, and downhill slope worsen. Third, drivers in this study were alert and looking for a known set of possible objects in the roadway. Table 23 through table 28 present VES and object combinations with mean detection distances that might compromise sufficient stopping distances (shown by an “X”).
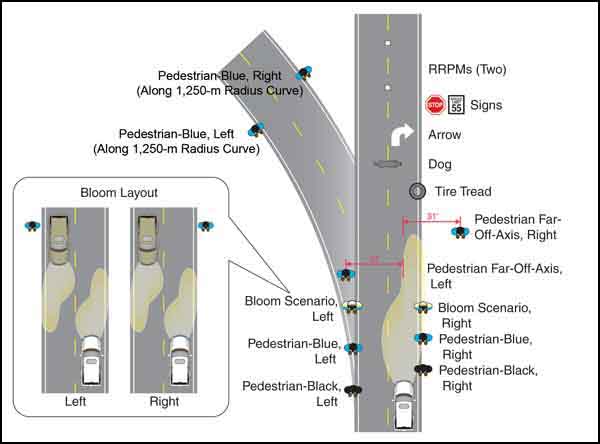
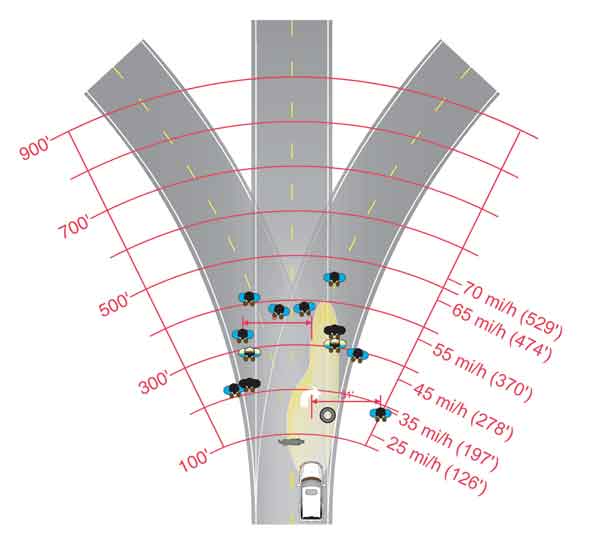
DETECTION AND RECOGNITION CAPABILITIES SUMMARYTo provide an overall look at the individual performance, graphics are provided for each VES. These graphics depict the detection performance for each of the pedestrian scenarios, the obstacle scenarios (i.e., dog and tire tread), and the turn arrow. Pedestrian icons facing straight down on the diagram were presented on straight road segments. Pedestrian icons angled with the road were presented on the curved road segment. Each graphic is intended to give an overall impression rather than precise comparisons. Additional details are given in the Results section on patterns or items of interest identified in the graphics. In addition, the following Discussion sections use the graphics to provide a quick comparison of the results. Each graphic includes an icon representing mean detection distance for a given object (figure 61). The mean detection distance scale appears on the left side of the diagram. The approximate stopping distance required for given speeds appears on the right side of the diagram. Where an icon is below a given speed, the stopping distance (where required) may be insufficient for the given speed. Stopping distance approximations are discussed in more detail in the Stopping Distance section. Figure 61. Diagram. Detection distance diagram key.
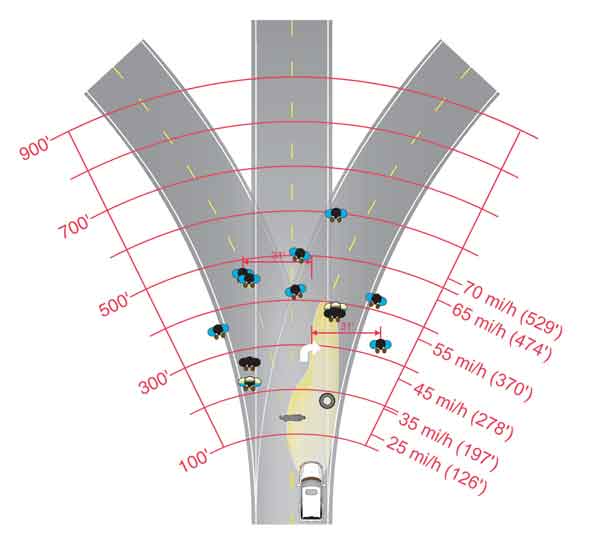
As was found in previous research and likely resulting in part from the alignment protocol used, HLB provided good detection and recognition as compared to the other systems tested. The HLB, which was the baseline for the technologies tested, was better than or equal to the HID vehicles in every scenario tested. The HLB was also better than or equal to the NIR 2 vehicle in every scenario tested. In the pedestrian scenarios tested, the HLB lamps provided sufficient detection distances up to 89 km/h (55 mi/h) for all but the far off axis pedestrian to the right, the pedestrian dressed in black to the left side of the road, and the left-hand bloom pedestrian. The HLB was the best for detecting the turn arrow of any of the vehicles tested. It was surpassed only by the FIR for detecting the dog, and it was equaled only by the HID 1 in detecting the tire tread. Figure 62 indicates the mean detection distances provided by the HLB for all of the tested objects, except RRPMs and signs. Figure 62. Diagram. HLB mean detection distances.
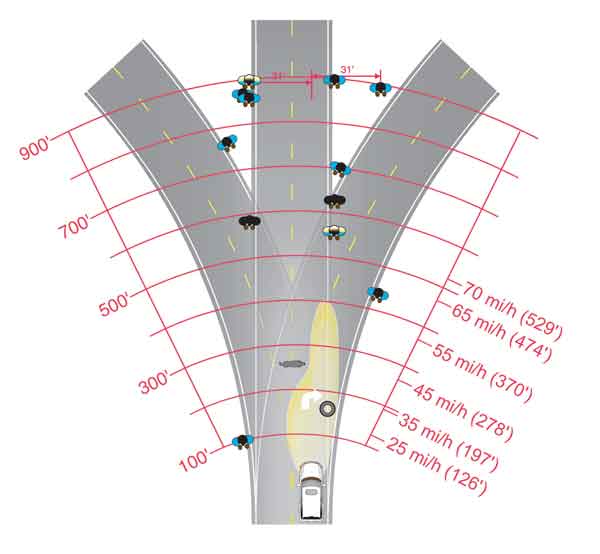
As shown in figure 63, the FIR provided excellent detection of warm-bodied obstacles, was approximately equivalent to the baseline on detecting the tire tread, and had shorter detection distances for retroreflective objects. The distances for the RRPMs and signage appear to be sufficient for normal use. Road markings similar to the turn arrow may be an issue if stopping is required at speeds of 56 km/h (35 mi/h) or more. This is approximately 16 km/h (10 mi/h) lower than speeds possible with the baseline. The FIR provided better detection of pedestrians than did the baseline for all scenarios except for the pedestrian on the right side of the right-hand turn, which was similar to the baseline, and for the pedestrian on the left side of the left-hand turn, which was surpassed by the baseline. The uncharacteristically short mean detection distance for the pedestrian on the left side of a left-hand turn appears to indicate that a wider FOV may be beneficial. This finding is discussed in more detail in the Field of View section of this report. Figure 63. Diagram. FIR mean detection distances.
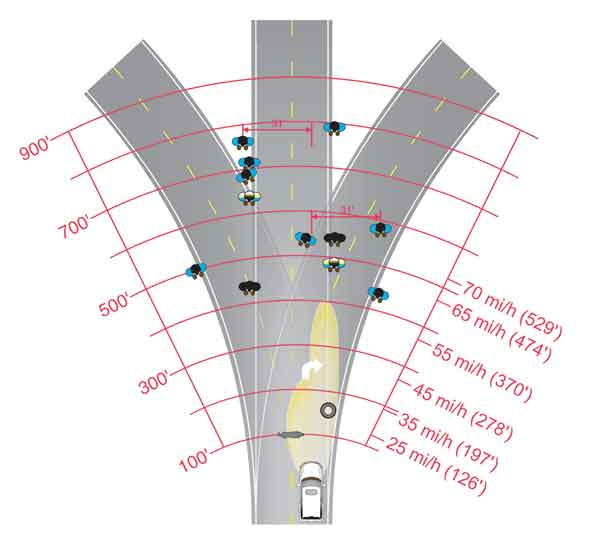
The NIR 1 vehicle provided good overall performance, providing benefits in pedestrian detection over the baseline for all of the pedestrian scenarios except for the two right-hand turn scenarios (figure 64). In these scenarios, the NIR 1 was comparable to the baseline; however, in the dog and turn arrow scenarios, the baseline vehicle gave an approximate 16-km/h (10-mi/h) advantage. Figure 64. Diagram. NIR 1 mean detection distances.
The NIR 2 did not surpass the baseline HLB in any of the scenarios tested. In fact, in 2 of the 12 pedestrian scenarios, in which a pedestrian was on the left side of a left-hand turn and a pedestrian was on the right side of a right-hand turn, it statistically underperformed the baseline. The NIR 2 VES did not perform better than the baseline in the bloom scenarios. For road markings similar to the turn arrow, speeds at or above Figure 65. Diagram. NIR 2 mean detection distances.
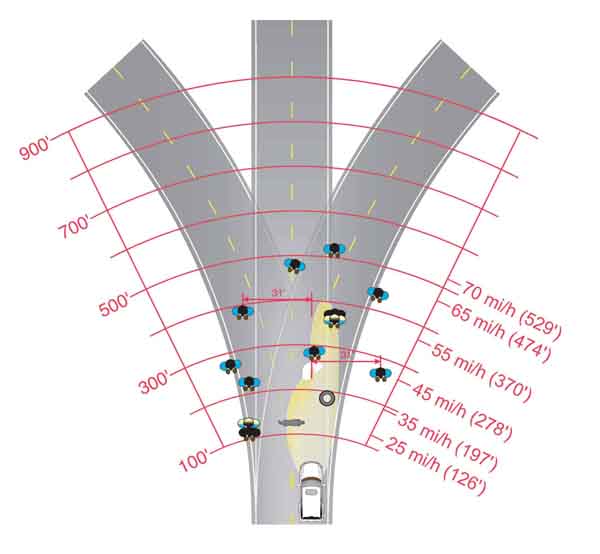
The HID 1 vehicle did not surpass the baseline HLB vehicle in any of the scenarios tested. The HID 1 vehicle had statistically shorter detection distances than the baseline where a pedestrian was on the left side of a left curve and the left side of a straight section in both black clothing and blue clothing. The detection distance for the turn arrow was also statistically shorter than the baseline. This indicates HID 1 would require speeds roughly 16 km/h to 32 km/h (10 mi/h to 20 mi/h) lower than HLB’s speeds to stop in response to the pedestrians on the left (figure 66). Figure 66. Diagram. HID 1 mean detection distances.
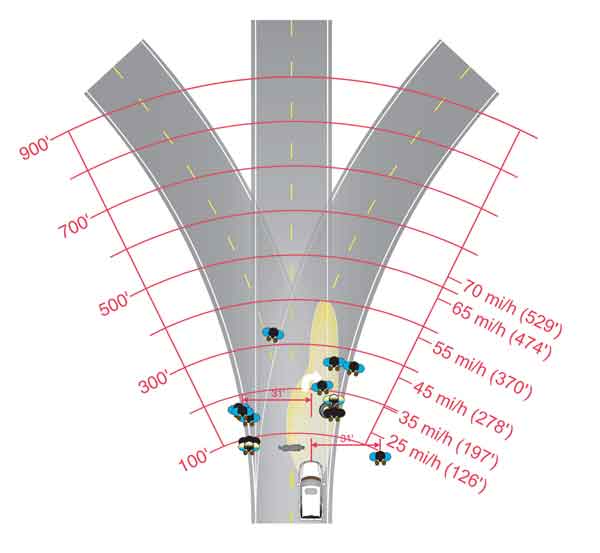
The HID 2 VES underperformed the baseline in all of the tested scenarios in which the pedestrian was on the left (except for the left-hand bloom scenario), the pedestrian far off axis to the right scenario, and the tire tread. Based on stopping distance approximations, if complete stopping was necessary, the HID 2 VES appears to provide insufficient detection distances for responding to any of the pedestrian scenarios at speeds of 89 km/h (55 mi/h) or greater. For all of these pedestrian scenarios in which a pedestrian was on the right side of the road, nearest to the driver’s lane of travel, speeds of 72 km/h (45 mi/h) or greater appear to be too fast when stopping is required (figure 67). Figure 67. Diagram. HID 2 mean detection distances.
AGE EFFECTS ON DETECTION AND RECOGNITIONOf the three types of objects tested—pedestrians, obstacles, and retroreflective objects—only the pedestrian scenarios indicated age-related differences due to VES (i.e., Age by VES interactions). All of the age groups did better overall in detecting pedestrians with the NIR 1 and the FIR than with the other VESs. General age effects, regardless of VES, indicated that age was a factor in both detecting objects and differentiating signs. From the object group analysis, it appears that the older group (65 years and older) had shorter detection distances overall, and the younger (18 to 25 years) and middle groups (40 to 50 years) were similar for obstacle detection; however, the younger group performed better than the middle group when detecting pedestrians. When differentiating a stop sign from a yield sign, the younger group had significantly longer distances than did the middle and older groups. Differentiation occurred for the younger group at approximately 335.3 m (1,100 ft), while the differentiation for the middle and older groups occurred at approximately 213.4 m to 243.8 m (700 ft to 800 ft). The p value for this age effect when reading a speed limit sign was 0.0513, which does not meet the p < 0.05 criteria; however, this finding probably agrees with an expected lower visual acuity found in older age groups. AGE AND VES INTERACTIONSAlthough all subjects appeared to benefit from the IR VESs, the older subjects appeared to benefit more from the NIR 1 than the FIR. The opposite was true for the younger and middle-aged groups. It is somewhat surprising that the older subjects were not able to obtain the same benefit from the FIR as they did from the NIR. It appears that the older age group may not have experienced the same benefits as the younger and middle-aged participants in detecting pedestrians with the FIR vehicle. That is to say, for the younger group and the middle group, in many pedestrian detection scenarios, the FIR had longer detection distances than the NIR 1. In several cases, the NIR 1 appeared to give an advantage to the older group as compared to the FIR system. These cases and a comparison of the systems are provided below. As is true for all of the age groups combined, specific comparison of older drivers with an IR system to older drivers with the benchmark indicates greater performance with the IR systems. To characterize the extent of IR technology’s benefits for older users further, the older group’s performance with the two leading IR VESs was first compared to that group’s performance with the benchmark HLB VES. Figure 68 portrays the values used in this comparison. With the NIR 1 VES, the older group performed better than with the benchmark in 11 of the 12 pedestrian scenarios. In the right turn scenario with a pedestrian on the left side of the road, the older group’s NIR 1 performance was essentially equivalent to the HLB. Again for the older group, when comparing the FIR to the HLB, the performance with the FIR VES was better in 4 of the 12 pedestrian scenarios (pedestrians dressed in black on straight segments and the bloom scenarios). The older group’s performance on the left turn with a pedestrian on the left scenario was better with the HLB than with the FIR VES. Note that this lower performance of the FIR VES in this scenario was present for the younger and middle-aged groups as well. For the remaining seven scenarios, the performance with the FIR VES was similar to the performance with the HLB. From the comparisons of these IR vehicles to the HLB vehicle, it is clear that the IR provides benefits in the tested scenarios. Next, the performance of the younger group with the HLB was used as a comparison point for the older group’s performance with the IR vehicles. The nighttime detection and recognition capabilities of the older drivers are in general lower than the capabilities of younger drivers. Through comparison of younger drivers with the HLB benchmark to older drivers with an IR system, it is possible to estimate the extent to which an older user might benefit from the use of an IR vehicle. Figure 68 provides a performance comparison of the younger participants using the HLB to the older participants using the FIR and NIR 1 VESs. It appears that the participants 65 years and older driving with the NIR 1 were able to detect pedestrians about as well as the 18- to-25-year-old participants driving the vehicle with HLB. Where this comparison indicates underperformance of the older group using an IR vehicle, it is important to remember that this is a comparison of the older group to the younger group. In almost every scenario, the older group using an IR vehicle outperformed itself using the HLB. Figure 68. Bar graph. Mean detection distances of pedestrians for older group with IR versus younger group with HLB.
The older group with the NIR 1 outperformed the younger group with HLB on 4 of the 12 scenarios, performed similarly for 7 scenarios, and underperformed the younger group with the HLB on only 1 scenario. When the older group using the FIR was compared to the younger group using HLB, the older group outperformed the younger on 2 of the 12 scenarios, performed similarly on 7 scenarios, and underperformed the younger group on 3 of the scenarios. PERFORMANCE IN CURVES FOR ALL VISION ENHANCEMENT SYSTEMSThe most critical curve scenario, making a right turn with a pedestrian standing on the right side of the road, is discussed first. In this scenario, most systems were similar to each other, with detection distances between 126.5 m (415 ft) and 131.1 m (430 ft). This group includes the HLB, HID 1, NIR 1, and the FIR vehicles. Detection distances in this scenario were shorter for the NIR 2 and the HID 2, with means approximately 30 percent shorter than the other systems. Figure 69 indicates the mean detection distance for each of the VESs for pedestrian detection in curves. Figure 69. Bar graph. Mean detection distances for VES by Object (people) interaction, turns only.
In the next most critical scenario, where a pedestrian is standing on the right side of a left-hand curve, both the FIR and NIR 1 VESs allowed for detection of the pedestrian earlier than all of the headlamp-only systems. The NIR 2 vehicle was comparable to the HLB vehicle in this scenario. It appears that with the clear view into the turn as the driver looks across the oncoming lane, the FIR and NIR 1 vehicles were able to present the pedestrian earlier. For headlamp systems with an extended beam pattern in the right lane, sufficient light reaches a pedestrian on the left later when making this same turn. This is particularly true when there is a distinct cutoff in the beam pattern, such as with the HID 1; however, in right turns the display-based systems and the headlamp systems are similar; the extended beam pattern to the right permits detection of the pedestrian at a distance that is essentially the same as when the pedestrian becomes visible on the IR display. When comparing the headlamp-based vehicles to each other for turns, the HID 2 vehicle underperformed both the HLB and HID 1 vehicles in all scenarios. The HID 1 VES is comparable to the baseline HLB in right turns with the pedestrian on either the side of the road; however, in the turn to the left, the HID 1 had significantly shorter detection distances than the HLB when the pedestrian was on the left side of the road. This characteristic of lower performance to the left agrees with the performance findings in the straight road pedestrian scenarios as well. Performance of the FIR and NIR 1 vehicles varied with curve and pedestrian location. In left turns, these systems appeared to provide advantages where FOV was sufficient. It appears that with the IR-based VESs with an 11.7° FOV, a pedestrian standing on the left side of the road in a left-hand, 1,250-m curve may not have entered the view of the IR system. The reader is referred to the Field of View section of this report for further discussion. CLOTHING COLORWhile the effect of blue clothing versus black clothing on nighttime visibility seemed clear for traditional halogen lamps, it was not certain what the outcome would be for IR-based vehicles. The two pedestrian scenarios conducted on straight segments permitted a comparison of the effect of blue clothing versus black clothing on detection distances. All of the VESs demonstrated longer detection distances for pedestrians dressed in blue clothing than for pedestrians dressed in black clothing. The FIR vehicle had the lowest differences. This is to be expected because the FIR is based on thermal differences between the object and the background rather than on differences in the visible spectrum; however, it is still surprising that blue had longer detection and recognition distances than black for this system. There are a few possible explanations for this result:
Whether in black clothing or denim, pedestrians on the left were more difficult to detect than pedestrians on the right. This pattern was present in the recognition distances as well. The comparison of HID headlamps to halogen headlamps was also of interest in relation to clothing color. The HID 1 VES had the most similar overall detection and recognition distances to the HLB VES and so can be used to investigate relationships between headlamp type (i.e., HLB versus HID) and detection distances for different clothing color; however, differences in beam patterns between the two types of headlamps make this relationship difficult to determine clearly. Table 29 shows a percentage improvement in detection distance for each of the systems for the two comparable pedestrian scenarios.
The overall benefit obtained from the blue clothing over the black clothing for the HLB was 64 percent. The improvement for the HID 1 was 71 percent. Comparing the differences between left and right indicates possible differences between the two because of the beam pattern. With the HID 1, pedestrians in blue on the left side of the road were detected 94 percent farther away than those in black on the same side. With the HLB, the pedestrians in blue were detected only 68 percent farther away than black. Looking now at the right side of the road, which was more highlighted by the beam patterns, the advantage of blue clothing drops to 48 percent longer detections for the HID 1, and it drops to only 60 percent for the HLB. It appears that the more diffuse beam pattern of the HLB may be generating similar left-right values, while the more discrete pattern of the HID 1 makes the blue clothing have more of an advantage on the left side than on the right. The aiming pattern of the HLB also likely influenced this finding. SUBJECTIVE MEASURESParticipant AcceptanceTo evaluate users’ acceptance of the VESs, the subjective ratings provided after driving with each system can be used. In particular, three statements that required the participant to evaluate the VES in comparison to his or her own headlamps provide insight into customer acceptance. One statement required the participants to indicate if the VES was better than their regular headlamps, and the other asked them to indicate if the VES made them feel safer. In terms of better performance, no differences were found between the VESs. In terms of feeling safer, NIR 1 received a higher rating than HID 2; the others were not distinguishable. All responses were above neutral. The NIR 1 had the most positive participant indications for providing detection and recognition benefits over normal headlamps. HID 2 had the worst evaluation. When asked if the VES helped them stay on the road better than their regular headlamps, participants did not score the VESs far from the neutral rating overall; however, it appears that the participants’ perception is that the NIR 1, the HLB, and the HID 1 provide some advantage in seeing where the road is heading, while responses indicate that the HID 2 provided the least advantage in terms of seeing the road’s direction. Participant responses indicated that the IR VESs did not allow them to read roadside signs sooner than regular headlamps, whereas the headlamp systems did. When indicating if the VES allowed them to read signs beside the road sooner than regular headlamps, responses for the IR systems indicated disagreement with the statement, while responses for the headlamp systems indicated agreement. As was expected, the participants’ subjective responses do not necessarily reflect their performance differences between the VESs. This may occur for several reasons. A new technology may be thought of as better when compared to a familiar technology. Also, people may not be good judges of their performance. Greater light in the foreground may give the perception of better visibility while actual detection capabilities may not be better. Examples where subjective measures did not reflect actual performance can be seen when comparing HID 1 to the baseline halogen headlamps. In the subjective ratings, while the HID 1 VES was not statistically different from the baseline in any of the statement responses, it frequently had higher ratings (lower numerical scores) than the HLB VES; however, in the detection measures, the HID 1 demonstrated lower capabilities in some scenarios. The HID 2 VES scored below the baseline on subjective evaluations of detecting and recognizing objects, seeing where the road was heading, and feeling safer. The NIR 1 surpassed the baseline on the evaluation of its ability to detect objects sooner than regular headlamps. As with the other IR vehicles, it was less helpful in reading signs than regular headlamps. Open-Ended Comments on VESsComments about a specific VES that occurred with 2 or more out of the 18 participants were as follows: FIR
NIR 1
NIR 2
HLB
HID 1
HID 2
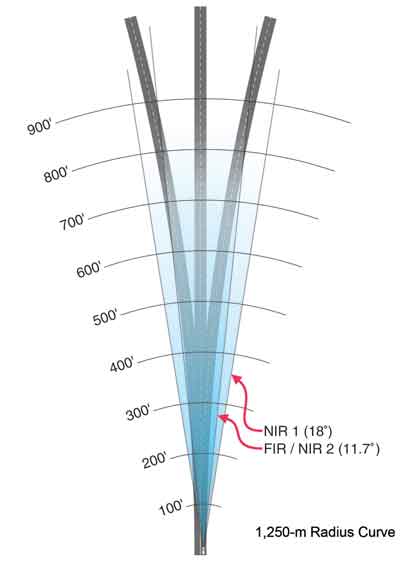
IR TECHNOLOGIES PERFORMANCE SUMMARYActive IR versus Passive IRConsideration of selected objects can provide some insight into the performance comparison between NIR (active) and FIR (passive) technologies. For this comparison, the results from the FIR and the NIR 1 will be used. Analysis of the pedestrians on the right side of the straight road segments provides a method for minimizing the effects of FOV between the NIR and FIR systems tested in this study; therefore, the pedestrian in black on the right, the bloom scenario with a pedestrian on the right, and the pedestrian in denim on the right will be used for this analysis. Pedestrians in black on the right side of the road were detected roughly 24.4 m (80 ft) (13 percent) farther, on average, with the FIR vehicle than with the NIR 1 vehicle. Pedestrians in denim clothing on the right side of the road were detected approximately 30.5 m (100 ft) (12 percent) farther, on average, with the FIR than the NIR 1. In the bloom scenario, the pedestrian on the right was detected approximately 21.3 m (70 ft) (13 percent) farther with the FIR than the NIR 1. It appears that the FIR VES drew attention to the presence of (i.e., detected) pedestrians 21.3 m to 30.5 m (70 ft to 100 ft) earlier than the NIR 1 VES. It is important to note that the shortest of the measures found with IR vehicles for each of these pedestrian-on-the-right scenarios were well past the best detection range for any of the headlamps in the same scenario. This finding indicates that the differences between the FIR and NIR VESs being discussed are due to the IR systems rather than to headlamp differences on the platform vehicles. Comparison of the dog and the tire tread provide additional insight into the performance of these two VESs. For both FIR and NIR 1, detection and recognition of the dog and tire tread occurred at less than 79.3 m (260 ft), so differences in the vehicle platforms headlamp could be involved. For the tire tread, the mean detection distances were essentially the same for the FIR and NIR 1 (less than 4.6 m (15 ft) mean difference); however, for the dog, the detection distance with the FIR VES was 78.9 m (259 ft), which was 48.8 m (160 ft) earlier than with the NIR 1 VES. These detection distances indicate that the FIR may support sufficient stopping distances up to approximately 64.4 km/h (40 mi/h) in this scenario, while the NIR may be limited to approximately 32.2 km/h (20 mi/h). The less visually conspicuous warm-bodied objects, similar to the dog, require faster response times. It also appears that the additional time an FIR system provides for detection of these smaller warm-bodied objects could be used by the driver. Using the tested systems as general approximations in terms of sensing and display capabilities of the technology types (i.e., FIR or NIR), it appears that an FIR system provides detection benefit over an NIR system in detecting warm objects. Both types of system appear to provide detection in time for stopping at typical driving speeds. For signs and RRPMs, the NIR 1 vehicle outperformed the FIR vehicle. Though detection with the NIR vehicle was 335 m (1,100 ft) farther than with the FIR vehicle, detection distances for both vehicles were more than 520 m (1,700 ft), well within the necessary distances for responding to signage. The mean detection distance for the RRPMs with the FIR was 160.6 m (527 ft), which is at the stopping limits for speeds above 113 km/h (70 mi/h). This speed drops to 56 km/h (35 mi/h) for the turn arrow for both the NIR 1 and FIR VESs. The mean detection distances for the turn arrow and the tire tread were similar to each other for the FIR vehicle. Field of ViewThe FIR system was better at detecting pedestrians on the left side of the road than was the NIR 1 in most cases, but they were similar for pedestrians on the right. This holds true for the pedestrians in black on a straight section and pedestrians in blue on a straight section, in a right turn, and in the bloom scenario. Two explanations are proposed for this difference: (1) the amount of NIR light hitting pedestrians on the right side of the road was more than on the left and (2) differences in FOV make objects in the center more conspicuous for the narrow FOV system (FIR) than for the wide FOV system (NIR 1). To evaluate whether FOV affected performance at various angular distances from the vehicle longitudinal axis, detection distances for the pedestrians in denim at the far off axis location and turn locations may be compared to the pedestrians in denim on the straight sections. Discussion here will simply determine if the vehicles performed sufficiently well. In terms of performance at freeway speeds, the FIR VES, with a narrower FOV (11.7°), had insufficient approximated stopping distances throughout the speed range when a pedestrian was standing on the left side of a left-hand turn. The wider-angle NIR 1 VES (18°) had longer mean detection distances and therefore acceptable stopping distances for this scenario. As mentioned previously, the detection distance in this scenario was uncharacteristically short for the FIR system. For a possible explanation of these findings, an analysis of the road geometry and FOV was performed. The analysis involved a review of the systems’ FOVs on the curve used in the study, as well as a re-creation of the scenario based on computer-aided design (CAD) (figure 70). Review of the system display with a pedestrian on the road at the position tested in this scenario indicated that the pedestrian on the left in the left turn was not visible in the 11.7° system; however, the driver’s track in the lane could vary the outcome of this test somewhat. The diagram in figure 70 illustrates the CAD-based analysis that was also conducted. The analysis indicates that a pedestrian in this position would probably appear just outside the view of the 11.7° FOV system. The pedestrian stood on the inside of the left-hand curve 1 ft (0.305 m) to the outside of the lane. In this position, the pedestrian is either outside or on the edge of the 11.7° FOV. On the right-hand curve, the 11.7° FOV encompasses much more of the side of the road. The 18° FOV extends farther beyond the road edge on both sides. Figure 70. Diagram. Comparison of 11.7° and 18° FOV.
Participants appeared to be sensitive to the two systems’ fields of view. In the open-ended questions following drives with the VESs, 4 of 18 participants indicated that they would like the FOV in the 11.7° FOV FIR system to be wider, and two indicated the same for the 11.7° FOV NIR VES. Comments included “not wide enough,” with two people indicating “especially to the left” and one saying “especially on inside of curves.” No comments related to FOV were made about the 18° FOV system (NIR 1). Presence of DisplayWhen introducing a vision system, it is important to compare performance without the system to performance with the system to determine if any losses in performance occur. In this study, it is not possible to directly compare one vehicle with a display-based vision system to the identical vehicle without the display-based vision system. However, the pedestrian standing on the left side of a left-hand curve scenario tested in this study may provide a similar comparison to the “with-and-without” comparison just described. In this scenario, the FIR vehicle provided the data for a pedestrian standing on the left side of a left-hand curve. It is important to recognize that the FIR vehicle may be used as an example of this issue because of its higher performance in the other pedestrian detection scenarios. Where the pedestrian was standing on the left side of the road in the left-hand curve, the FIR vehicle had the shortest mean detection distance (29.9 m) (98 ft) of the VESs tested. The mean detection distance in this scenario included two cases of a participant completely missing the pedestrian. These are the only complete misses that occurred for this scenario. The mean detection distance stands in contrast to the fact that the FIR had the longest mean detection distance for all of the other pedestrian scenarios. Mean detection distance when the pedestrian was on the left in a left-hand curve was shorter for the FIR than for the shortest headlamp-based VES. This distance for detecting a pedestrian dressed in denim was shorter than the mean distance for detecting a tire tread on the road (50.6 m) (166 ft). The NIR 2 vehicle, which had the same pillar, glass geometry, and headlamps as the FIR vehicle but a generally lower-performing display-based system, had a mean detection distance of 66.2 m (217 ft), which was twice that of the FIR vehicle in the same scenario. A comparison of the visibility level of the pedestrian in this scenario was also conducted. The visibility level value is based on photometric data, observation time, object size, and contrast values between the object (pedestrian) and the background when illuminated by the vehicle’s headlamps and results in a unitless value. The visibility level was calculated based on the method presented in Illuminating Engineering Society of America Recommended Practice #8 (2000) where visibility levels of 2.6 to 4.9 are considered sufficient for detection and are used for the design of roadway lighting installations.(16) The calculated visibility level of the pedestrian, provided by the vehicle headlights, at the mean detection distance for the FIR vehicle was 106 at 29.9 m (98 ft). The visibility level at detection for the other vehicles ranged from 9 to 49. The NIR 2 vehicle, which had the same headlamps as the FIR vehicle, had a visibility level of 33 at 66.2 m (217 ft). This indicates that illumination from the vehicle headlamps was sufficient to detect the pedestrian much earlier than when detection actually occurred. Based on this information, it appears that when objects are not presented in a vision system display, detection distances may be reduced below those found with headlamps alone. As introduced earlier, one question to consider is why the NIR 2 VES, with the same FOV as the FIR, did not have the same low mean detection distance for this scenario. It is believed that the lower overall usability of the NIR 2 display may provide some explanation for this difference. The lower usability of the display by the participants may reduce the amount of attention or visual sampling allocated to the display, thereby increasing the opportunity to observe the pedestrian directly with just headlamps. As mentioned previously, because a vehicle was not available with the same headlamps but without a vision enhancement system, and because of the singular scenario available in this test framework to test this FOV, it is difficult to determine definitively if the presence of the VES reduced detection distances below what they would be had no VES been present. Headlamp performance, frequency of thermal objects in study, a conscious decision of users to use FIR for distance detection and rely on headlamps for near detection, or system novelty/experimental situation must also be considered as possible factors in this finding. The combination of indicators does imply that further analysis is warranted. Further descriptions of the factors involved are given in ENV Volume XVI, where the objects are described in more detail and visibility measurements are provided. Bloom ScenarioThe better IR VESs (FIR and NIR 1) revealed a pedestrian veiled by oncoming headlights on either side of the road earlier than any of the headlamp-based systems. Where the pedestrian was standing on the left side of the road near a car parked in that lane, the IR VESs (FIR and NIR 1) showed the most benefit over the HLB and HID vehicles. The mean detection distance for the FIR (273.7 m) (898 ft) in this pedestrian-on-the-left bloom scenario was almost four times the mean detection distance of the HLB (68.9 m) (226 ft), and the mean detection distance of the NIR 1 (193.6 m) (635 ft) was almost three times that of the HLB. There may have been some slight reduction in the mean detection distance of the FIR because of the limited sight distance available for some presentations of the scenario. A comparison of when a given vehicle type (IR or headlamp) revealed a pedestrian on the right in glare versus when it revealed a pedestrian on the left in glare indicated opposite results between the IR VESs and the headlamp-based systems. In the bloom scenario, for all of the headlamp-based systems, the pedestrian on the right, closer to the driving lane, was detected at longer distances than the pedestrian on the left. This probably resulted from the emphasis on the right side of the road in the beam pattern of the headlamps; however, the reverse was true for the IR VESs. With the IR VESs, the pedestrian on the left side of the road, closer to the glaring headlamps, was detected earlier than the pedestrian on the right side of the road. With the NIR systems, this probably resulted from the image processing used to reveal objects behind the glaring headlights. With the FIR system, this may have resulted from attention being drawn to the vehicle on the left with a visibly warm engine block, or it may be due to an overall warmer field to the left than to the right. Looking specifically at the headlamp technologies, the HLB had significantly longer detection distances than either of the HID headlamps when the pedestrian was on the left side of the road, near the oncoming headlamps. When the pedestrian was on the right side of the road, the HLB and the HID 1 VESs were not significantly different from each other, but the HID 2 was shorter than the others. Figure 71 illustrates these differences. Figure 71. Bar graph. Detection distances for VES by Pedestrian Locations interaction, bloom scenarios only.
HID TECHNOLOGIES PERFORMANCE SUMMARYAs a rule, in the driving scenarios tested in this study, HIDs did not have better performance qualities than halogen lamps. The HID 2 detection and recognition distances were lower than the benchmark HLB distances in all of the tested scenarios. The HID 1 was more comparable to the HLB; in the tested scenarios, it was either not statistically different from the benchmark or it had lower performance. The pedestrian scenarios in which the pedestrian was on the left side of the road showed lower performance with the HID 1 than with the HLB. The performance of the two systems was approximately equal when the pedestrian was on the right side of the road. Figure 72 shows the comparison of these two VESs. It is important to note that the results described in this section could have been affected by the alignment protocol used for the HLB configuration. Figure 72. Bar graph. Detection distances for VES by Pedestrian Scenario interactions: HLB vs. HID.
COMPARISON TO PHASE IIComparison of this research to the previous ENV Phase II research can be made using the pedestrian dressed in black on the right side of the road and the tire tread, as well as with the HLB and FIR VESs; however, certain caveats must be made. In Phase II, the pedestrian dressed in black was moving, while in this research the pedestrian was stationary. In comparing the FIR used in this research to Phase II, it is important to realize that the prototype reflective mirror display system used here was different than the see-through projected display used in Phase II, and the FIR vehicle platform used here was a SUV, while the FIR platform used in Phase II was a sedan. A comparison of the detection distance values from Phase II to those in this research are shown in table 30.
The mean detection distance for pedestrians in black on the right appears to have approximately a 6 percent difference between the two phases of research for the FIR vehicles and approximately a 3 percent difference for the HLB vehicle. The tire tread with the FIR also had a detection distance difference of 3 percent from Phase II to the current research. With the HLB VES, the difference was 23 percent, with the current research having a shorter detection distance. Overall, this appears to indicate agreement in results of the two studies. The differences for the tire tread with HLB may have resulted from the types of objects used and participant expectations while scanning the roadway. The current research used a larger number of target objects in more locations than Phase II. In addition, nearly all of the target objects tested in this research were more visible to the participant than the tire tread. FREQUENCY ANALYSISDiscussion to this point has described the headlamps using means for all of the participants. This approach used alone has the potential of masking situations where a few participants had problems with a VES. A comparison of the frequency of short detection distances was made to address this possibility. Using the stopping distance approximation described previously, each pedestrian detection was grouped according to highest speed at which the participant could theoretically have stopped before reaching the pedestrian. Several caveats should be considered in this analysis. First, stopping distances for speeds up to 113 km/h (70 mi/h) are approximated, although the participant was driving 40 km/h (25 mi/h). Second, the pedestrian scenarios varied in their degree of criticality. For example, pedestrians on the left side of the road or Figure 73. Line graph. Percent of detection distances insufficient for complete stop for pedestrian scenarios.
As illustrated in figure 73, the NIR 1 VES had the lowest percentage of trials that may have had insufficient stopping distances at speeds up to 89 km/h (55 mi/h). At speeds up to 72 km/h (45 mi/h), the FIR VES had a higher percentage of the theoretical insufficient stopping distance trials than the NIR 1 and the HLB. These are essentially very late detections, which make the FIR percentage higher from the start (it should be noted that these late detections are not solely due to the pedestrian standing on the left side in a left-hand turn). At higher speeds (greater than 72 km/h (45 mi/h)), FIR shows advantages over the HLB, indicating fewer trials with insufficient detection distances. The HLB is similar to NIR 1 at low speeds, but as speeds increase, a greater number of insufficient detection distances may occur with the HLB. The HLB tested had fewer occasions of possible insufficient stopping distances than HID 1, NIR 2, and HID 2 throughout the speeds approximated. HID 2 had the highest number of trials with detection distances that may have been insufficient for complete stopping.
|