Support of The System Test and Analysis Program for The Nationwide Differential Global Positioning System Modernization Program
FHWA Contact: Jim Arnold, HRDI-06,
202-493-3265, james.a.arnold@dot.gov
Phase I High Accuracy-Nationwide Differential Global Positioning System Report
View Table of Contents
Foreword
The Nationwide Differential Global Positioning System (NDGPS) Modernization
Program is a multiagency effort to examine the viability of long baseline carrier
phase differential correction techniques. Phase I of this program analyzes broadcasting
Global Positioning System observables from a single NDGPS site, Hagerstown,
MD, to aid in determining the appropriate signal structure and compression techniques
to support long range carrier phase operations. Phase II will install a second
facility near Hawk Run, PA, enabling multiple baseline carrier and code phase
navigation solutions.
This first report verifies that the accuracy that can be achieved over a long
baseline from a single facility is within the estimated 10-centimeter (95 percent)
horizontal navigation accuracy hypothesized.
| |
Gary E. Larsen
Director, Office of Operations
Research and Development |
NOTICE
This document is disseminated under the sponsorship of the U.S. Department
of Transportation in the interest of information exchange. The U.S. Government
assumes no liability for its contents or use thereof. This report does not constitute
a standard, specification, or regulation.
The U.S. Government does not endorse products or manufacturers. Trade and manufacturers'
names appear in this report only because they are considered essential to the
object of this document.
Table of Contents
1. Introduction
1.1 Background
1.2 The Current NDGPS System
1.3 RTCM-104 Correctors (A Public Broadcast Format Example)
1.4 Added RTCM-104 Messages to Support Centimeter Applications
1.5 Message Size
1.6 Organization
2. System Architecture
3. Functional Components
3.1 GRIM: A Brief Overview
3.2 Hydra and DynaPos
4. Compression and Data Categories
4.1 Bandwidth and Frequency
4.2 Base Station Data (from Hagerstown, MD)
5. Data Results
5.1 General Remarks
5.2 Raw Carrier Measurements Versus Carrier Measurements Received
by User
5.3 Raw Code Measurements Versus Code Measurements Received
by User
5.4 Brief Remarks Regarding the Number of Missed Data Packets
6. Static and Dynamic Applications (46 km and 250 km)
6.1 Static Examples (Hydra)
6.2 Dynamic Example (Dynapos)
7. Conclusions
Appendix A-Phase I Participation Options
Appendix B- Support of the System Test and Analysis Program
for the NDGPS Modernization Program
List of Figures
Figure 1. Hagerstown— The HA-NDGPS Broadcast Station
Rack
Figure 2. The Hagerstown GRIM Software Display
Figure 3. The Hagerstown Ashtech and Trimble Antennas
Figure 4. L1 Carrier Data: Raw Versus User-Received Compressed
and Decompressed
Figure 5. L2 Carrier Data: Raw Versus User-Received Compressed
and Decompressed
Figure 6. L1 Code Data: Raw Versus User-Received Compressed
and Decompressed
Figure 7. L2 Code Data: Raw Versus User-Received Compressed
and Decompressed
Figure 8. Number of Lost Packets During Chesapeake Bay Tests
Figure 9. Real-Time Hydra Plot Done at Facility near Dickerson,
MD
Figure 10. Real-Time Static Plot Performed near Dickerson,
MD
Figure 11. Real-Time Versus Post-Processed Ellipsoidal
Height
Figure 12. Real-Time Navigation Solution Compared to Post-Processed
Solution
Figure 13. Dynamic Results on a Stationary Platform
Figure 14. Error Due to Data Compression
Figure 15. Effects of Missing Epochs
1. Introduction
1.1 Background
When the Department of Defense (DoD) originally developed the Global Positioning System (GPS), it was a military system. GPS quickly became a tool for both military and civilian applications across the world. Initially, DoD intentionally degraded GPS signals. To compensate, civilian and military engineers placed equipment at specific sites to determine intentional errors. These errors were then broadcast to users who would correct their measurements. Because these corrections did not compromise security, Differential GPS (DGPS), as these corrections came to be known, flourished with little opposition from DoD. Because DGPS delivered nominally 6- to 20-meter (m) accuracy, the U.S. Coast Guard (USCG) developed a DGPS system along the U.S. coasts and waterways. The success of this system encouraged other governmental agencies to make such capabilities available in other parts of the country, particularly in the West and Midwest. This national extension is known as the Nationwide DGPS (NDGPS). The NDGPS is advertised as a 1-3-m system with 99.97 percent availability. NDGPS can deliver meter-level accuracies. The new vision, High Accuracy-NDGPS (HA-NDGPS), is designed to broadcast additional information from the same NDGPS network using a new carrier frequency to achieve fixed and/or moving centimeter (cm)-decimeter (dm)-level accuracies while maintaining as much integrity as possible. HA-NDGPS, and the ability to implement the system cost-effectively, is the subject of this report.
1.2 The Current NDGPS System
The USCG developed the original DGPS network. The U.S. Army Corps of Engineers (USACOE) needed a similar capability along inland waterways and, with the help of the USCG, established USCG-like broadcast stations. USACOE later adopted the NDGPS concept and developed additional stations. The US Department of Transportation (USDOT) continues to install NDGPS stations at retired Air Force Ground Wave Emergency Network (GWEN) sites. When installation is completed, there will be approximately 137 similar stations broadcasting Course/Acquisition (C/A) code correctors to users. This will enable meter-level positioning with an associated level of integrity.
1.3 RTCM-104 Correctors (A Public Broadcast Format
Example)
These beacons today broadcast single-frequency GPS code range correctors enabling
few-meter level positioning and navigation along the U.S. coasts and inland
waterways. An expected pseudorange value is computed for each GPS satellite
in view at the NDGPS sites. These computed values are compared with the actual
pseudorange measurements made at the sites; the difference is known as a pseudorange
corrector. The assumption is that the errors are common to both the reference
site and any user site. These correctors are placed in a formal bit stream with
message header, message type, and with parity considerations and broadcast to
users as a Type 9 message. This message is one of many broadcast as part of
the RTCM-104 protocol developed by the Radio Technical Committee for Maritime
Services (RTCM). The work of the RTCM committee is documented amply elsewhere;
this report only provides a brief summary.
Based upon the RTCM-104 message, users are able to perform meter-level positioning
in static or moving applications. This message requires approximately 660 bits
to send C/A code pseudorange correctors for 12 satellites. It should be noted
that correctors are sent because correctors are expected to require fewer bits
than observations. As a corollary, one can assume that sending complete C/A
code pseudoranges (for 12 satellites) would have taken more bits.
1.4 Added RTCM-104 Messages to Support Centimeter Applications
In the early 1990s, there was a need for a standard message that could support
accuracies better than what the RTCM-104 provided. The RTCM committee developed
two message types—18 and 19, and 20 and 21—to meet that need. Pairs
18 and 19 proved a more practical choice, because both pairs had similar bit
sizes, but pairs 18 and 19 provided users a message protocol compatible with
decimeter, centimeter, and even subcentimeter positioning. It should be noted
that pairs 18 and 19 require approximately 3000 bits to broadcast the full suite
of dual code and carrier measurements required by high-precision users.
With this proposed RTCM enhancement, centimeter-level survey and dynamic positioning
became possible (i.e., based upon an open format) in support of surveying, transportation,
and other industrial uses.
This format, however, is too large to fit within the bandwidth allotted to
HA-NDGPS.
1.5 Message Size
There are other formats available for sending code and carrier measurements
or correctors over a link to a user. Some of these are proprietary and little
is known about them. Other formats are currently under development. As we will
discuss later, it is very desirable to fit the entire GPS carrier and code observations
for 12 satellites within 800 to 1000 bits per second.
Experience with Medium Frequency Data Links has shown that, time-wise, shorter
messages provide substantial performance advantages. In cases in which pseudorange
corrections are sent, corrections can be broadcast in messages that contain
only subsets of satellites. For carrier phase observables, it may be preferable
to package all the observables from a given epoch in a single message. To maximize
code and carrier synergy, it also may be desirable to maintain the inclusion
of code and carrier observables in a single message.
The Federal Highway Administration (FHWA) converted GPS dual-frequency code
and carrier measurements at Hagerstown, MD, into a message stream that was sent
to a modulator. FHWA then interfaced the modulator output to the HA-NDGPS transmitter,
the output of which was combined (i.e., diplexed) with the current NDGPS broadcast
signal for final broadcast over the air to the equipped user. It was necessary
to fit the GPS measurements or correctors (12 satellites) within approximately
1000 bits.
FHWA then sent a stream of bits to the Government Furnished Equipment (GFE)
demodulator for translation (i.e., decompression) of the message into useable
data for resulting measurements and to demonstrate high-precision positioning
results. Real-time static survey was demonstrated at 46 kilometers (km) using
Hydra& software. Real-time moving application was demonstrated at 250
km using DynaPos& software.
1.6 Organization
This report first describes the overall system architecture.
The report then explains GRIM& (GPS Receiver Interface Module, developed by
XYZ GPS Inc.) and its interface with GFE and Hydra and DynaPos application modules
for demonstrating accurate static and dynamic positioning.
The next chapter covers compression and data categories, after which data results
are presented. Static and moving positioning examples are provided, followed
by suggestions for participation in concept validation. The report ends with
a summary and conclusions. See workshop proceedings for findings from an April
10, 2002, HA-NDGPS workshop.
2. System Architecture
The Hagerstown DGPS site is located at approximately 39° 33' 11"
north and 77° 42' 51" west. A system block diagram can be found
in the workshop proceedings from an April 10, 2002, HA-NDGPS workshop.

Figure 1. Hagerstown—The HA-NDGPS Broadcast Station
Rack
An existing Ashtech Z-12 GPS receiver provides the operational DGPS network.
A second output port from the same receiver transmits 1 Hz dual-frequency GPS
code and carrier measurements to a PC via an RS-232 port into the GRIM software
module.
Figure 2. The Hagerstown GRIM Software Display
GRIM plays two important roles. The most important is to compress the data into
the allocated bandwidth and pass the resulting "packet" to the GFE
modulator. GRIM's other primary role is to log the data in one or more formats:
Raw Ashtech Port Output for possible future playback; compressed packets for
possible future playback; or RINEX for future processing. During these tests,
it has been essential to store the raw data on the Hagerstown site PC, because
these data represent the data reference against which all comparisons ultimately
are made. The other two data types can be re-created exactly with GRIM in a
playback mode. In a fully mature system, it may be satisfactory to save the
compressed data, because it requires only 10 percent of the space occupied by
raw receiver output data.
GRIM passes the data packets to the GFE modulator, and the GFE modulator readies
the packet for transmission.

Figure 3. The Hagerstown Ashtech and Trimble Antennas
The Hagerstown transmitter broadcasts the message omnidirectionally over an
approximately circular area of radius 225 km or more. As discussed below, a
successful moving test was conducted on the Chesapeake Bay roughly 250 km from
Hagerstown. At 46 km, for example, there were very few missed data packets (0-10
per day with the current equipment). At 245 km, testers were beyond the recommended
range, but even at this distance, there were very few missed data packets away
from dockside on the Chesapeake Bay.
A PC is necessary at this early phase in the development cycle. As research
progresses, the demodulator and decompression functions likely will be built
into the GPS receiver, much like a Wide Area Augmentation System receiver.
3. Functional Components
3.1 GRIM: A Brief Overview
GRIM was developed to convert or translate different GPS receiver hardware to
a single interface. GRIM also performs many other functions. GRIM provides data
logging services in a variety of formats. The module also can command a GPS
receiver into various configurations and provides a suite of data compression
choices to fit a variety of data streams and bandwidths. GRIM provides a playback
feature that permits a replay of real-time data either to troubleshoot actual
real-time situations or to permit post-mission processing. GRIM provides data
streams to applications and can provide the same data, simultaneously, to multiple
applications or multiple copies of the same application.
Base Station GPS Receiver to GRIM and GRIM to Modulator
In the HA-NDGPS situation, GRIM takes in raw GPS measurements, compresses them,
and creates message packets to be passed on to the GFE modulator. There are
many possible data packet definitions that could be selected depending on what
data types need to be sent and specific bandwidth limitations. Whatever data
compression scheme is selected, the data packet header includes the data definition,
so that a user would continue to function even if the packet definition should
change. This has been described as "self-defining."
Demodulator to GRIM and GRIM to Application
During this Phase I period, GRIM has a second function at the user end. In this
case, GRIM receives a bit stream (which is a compressed data packet) from the
user site demodulator and decompresses it. Finally, GRIM passes the standardized
GRIM output to the user application software.
3.2 Hydra and DynaPos
Hydra is a software application that performs real-time (and playback) static
surveying and monitors hazardous motion. For this report, researchers used Hydra
in static survey mode 46 km from the Hagerstown site. The goal was to demonstrate
that Hydra achieves subcentimeter survey results based upon the HA-NDGPS broadcast.
The results are similar to findings with the raw data collected at the site.
This demonstrates that the HA-NDGPS broadcast information is nearly identical
with post-mission data; therefore, results similar to post-mission results can
be expected.
DynaPos is another real-time (and playback) software application for moving
applications such as hydrographic surveying, farming, or real-time kinematik
(RTK) DynaPos was run on static data that was treated as moving data and consistently
achieved steady-state positioning at the half-decimeter level for north and
east components and decimeter-level for the height component. Values given are
1-sigma values.
DynaPos later was used in a real-time test running from Tangier Island, VA,
to Crisfield, MD, on a mail boat. Actual real-time kinematic positioning results
were compared with post-mission results using raw data and with local results
from Tangier Island to the mail boat.
Although it is understood that precise carrier phase GPS methods work, researchers
were trying to demonstrate that the broadcast data that reaches the user agrees
at the millimeter level with the original data. This is proof that the HA-NDGPS
broadcasts will support proven high-precision methods, provided the data actually
reaches the user intact.
4. Compression and Data Categories
4.1 Bandwidth and Frequency
The ability to squeeze dual- (and even triple-) frequency GPS code and carrier
data or correctors into a small bandwidth is important because bandwidth is
precious. It also is preferred to deliver the data on a carrier signal of lower
frequency. A lower frequency signal becomes necessary to reach well beyond the
line of sight. Depending on output power and height of the transmission tower,
a transmitter might reach 75 km with a high-frequency line-of-sight signal,
but in contrast, the same transmitter could reach 3-4 times that far with a
lower frequency signal that can follow the ground and curvature of the earth.
The difference between a high-frequency and a low-frequency signal easily can
be a 10-fold factor in terms of the number of sites required. There is yet another
factor that is critical to robust delivery. Low-frequency signals are more useful
in buildings, forests, valleys, etc., than are high-frequency line-of-sight
signals.
It is desirable to reduce the current message to 800 or fewer bits in anticipation
of the third civilian GPS frequency, and progress with respect to further compression
continues to be made.
It should be noted that, while bit size is important, it is not the sole metric
for choosing a compact message. For example, data packets must be "self-contained"
and "self defining." Other qualities for consideration are flexibility
and growth.
4.2 Base Station Data (from Hagerstown, MD)
Three categories of base station data are defined below.
Raw Base Station Data (GPS Receiver Output)
Raw base station data is simply data as it is output from the GPS receiver port.
These data are not altered and are saved on the Hagerstown hard drive. For this
report, such data represents truth data. The data will be compared with what
the user receives over the air from the HA-NDGPS broadcast. It is important
to determine how much data does not reach the user (as a function of distance)
and how well the data received agrees with this raw truth data (i.e., any differences
would be caused by compression).
Compressed Data Ready for Broadcast (None missing yet)
These data are compressed and prepared for the modulator. It is possible to
save these compressed data along with the raw data. Since these data require
much less hard drive space compared to raw data, it might be preferable to store
compressed data instead of raw data, however, the raw data is the most fundamental,
of course.
Compressed Data Received by a User (Lost packets are possible as a function
of distance or SNR)
The compressed data received by the user can be different from the compressed
data that was actually sent in two primary ways. The first possibility is that
the signal strength of the broadcast could be very weak, perhaps as a result
of the transmitter being too far away. In this case, the data packet might be
garbled so that the checksum (actually circular redundancy check) does not agree
with the packet. The data must be discarded, as there is no data repair feature.
The second possibility is that the user's equipment is not turned on, so no
data can be received. This report only determines the percentage of missed packets
as a function of distance, at 46 km and at 250 km.
5. Data Results
5.1 General Remarks
At the Dickerson site, REMD, the signal-to-noise ratio (SNR) was approximately
25 decibels (dB), and the signal strength was approximately 67 dBW. During the
May 2002, Tangier Island test, at more or less 245 km distant, the SNR was approximately
13-15, and the signal strength was approximately 33. Researchers determined
that an SNR of roughly 13 was required for the broadcast data to be demodulated
and decompressed. At 46 km, missed packets were rare (possibly 0-10 per day),
whereas at 250 km, missed packets were a lot more frequent (perhaps 10 per hour
on the Chesapeake Bay and approaching 100 per hour at times at dockside). At
46 km, the signal was sufficiently strong that obstacles did not appear to cause
lost packets, but at 250 km, obstacles such as buildings appeared to become
a factor. Therefore, there were many missed packets (more than 1 percent) at
dockside at Tangier Island, but on the Chesapeake Bay at the same transmission
distance, there were relatively few lost packets.
5.2 Raw Carrier Measurements Versus Carrier Measurements
Received by User
Below are data comparisons between raw GPS receiver data and the data received
over the air at a facility 46 km away. The plots are striped, because the truth
data was written to RINEX files having 0.1-millimeter (mm) precision. The worst-case
difference between the L1 carrier phase truth data and the user data is 1.41
mm, as expected. The root-mean-square (RMS) difference was smaller than 1 mm.
The results were very similar for the L2 carrier data.
It should be noted that in both cases, the differences have a mean of essentially
0.0 and are expected to have no impact on static surveys and a negligible positioning
error on moving surveys. In real life, multipath and internal receiver noise
are much greater and do not yield a mean zero error over a few seconds.
Figure 4. L1 Carrier Data: Raw Versus User-Received Compressed
and Decompressed
Figure 5. L2 Carrier Data: Raw Versus User-Received Compressed
and Decompressed
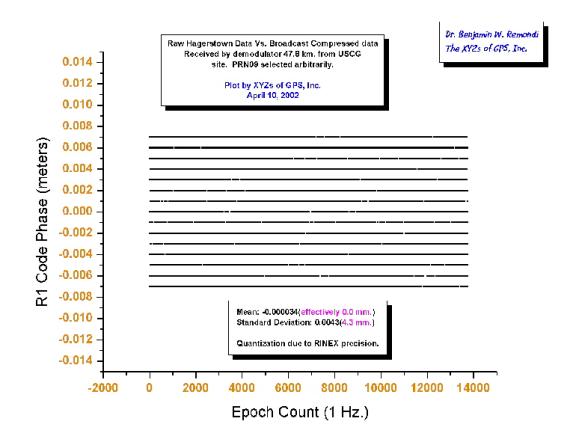
5.3 Raw Code Measurements Versus Code Measurements Received
by User
Next are data comparisons between raw GPS receiver code data and the data received
over the air at a facility 46 km away. The plots are striped because the truth
data was written to RINEX files having 1 mm-precision. The worst-case difference
between the L1 code phase truth data and the user data is 7 mm, as expected.
The RMS difference was roughly 4 mm. The results were very similar for the L2
code data.
It should be noted that in both cases, the differences have a mean of essentially
0.0 and are expected to have no impact on code-based static or moving applications
and no impact on initializing high-precision carrier-phase surveys.
Figure 6. L1 Code Data: Raw Versus User-Received Compressed
and Decompressed
Figure 7. L2 Code Data: Raw Versus User-Received Compressed and Decompressed
5.4 Brief Remarks Regarding the Number of Missed Data
Packets
At 46 km
As stated elsewhere in this report, there were very few missed packets at the
facility located 46 km from Hagerstown. The number of missed packets at this
site was too few for plotting purposes. There were many days in which there
were no missed packets; on other days there were as many as 10 missed packets.
At 250 km
The following plot indicates the number of missed packets that might be encountered
at the limits of the Hagerstown broadcast range. Here the signal is quite weak,
and receiving the signal away from obstructions did make quite a difference.
In the field, transmissions received in the middle of the Chesapeake Bay resulted
in the fewest number of missed packets. Transmissions to dockside at Tangier
Island (where there were buildings and other signal obstructions) resulted in
a larger number of missed packets. A combination of atmospheric conditions and
obstructions may have been responsible for this contrast. Even then, we were
able to continue our real-time application.
Figure 8. Number of Lost Packets During Chesapeake Bay Tests
6. Static and Dynamic Applications (46 km and 250
km)
6.1 Static Examples (Hydra)
Base Data
From April to June 2002, the GFE reception equipment was operated in Dickerson,
MD, 45.8 km from the Hagerstown broadcast station. The equipment included a
low frequency antenna which picked up the broadcast signal, a demodulator (and
its power source) to process those signals, a laptop computer for ingesting
demodulated, compressed messages, and GRIM software for decompressing the compressed
message into standard output. Normally this GRIM output was saved to the hard
drive for later comparisons and playback, and sent to an application program
such as Hydra or DynaPos.
User Data
In addition, a GPS receiver took and ingested data into a second GRIM on the
same computer that was ingesting the demodulator signal. These user data were
saved to the hard drive for playback and sent to Hydra and/or DynaPos.
Hydra (also known as 3D Tracker)
The base data and the user data were input into Hydra to perform real-time static
surveys. This was repeated many times typically allowing 1- to 3-day sessions.
At times, multiple Hydras with different settings ran simultaneously, and at
other times, a Hydra and a DynaPos ran from the same input streams. These runs
were always successful, and very few packets were lost due to the close distance
to Hagerstown (46 km).
Below is data from a typical Hydra run in which researchers did not input
position of site REMD. The correct coordinates are used below for plotting purposes
only. The first plot comprises nine graphs as listed in the legend. They include
height (H), east (E), north (N), and the associated standard deviations and
negative mirror values.
Figure 9. Real-Time Hydra Plot Done at facility near Dickerson,
MD
The next plot shows essentially the same things as the previous figure, with
an expanded scale. Decimeter-level results were achieved in an hour, and centimeter
results were achieved in several hours, just as one would expect from post-mission
processing. The goal was to demonstrate that the base data was reaching its
destination. If the data is reaching the user with nearly full precision, and
missed packets are rare, then users can perform any of the published GPS positioning
methods, whether they be current real-time methods or current post-mission methods.
All that is required is the right software residing on the appropriate platform.
Figure 10. Real-Time Static Plot Performed near Dickerson, MD
Final Remarks on Static Positioning using HA-NDGPS
It should be noted that perfect truth was not available for the plots above.
These figures show, however, that the data is reaching the user with nearly
the precision of the original data, demonstrating that all current methods are
effective.
6.2 Dynamic Example (Dynapos)
The next example is a moving platform example. A field campaign was undertaken
in the Chesapeake Bay roughly 250 km from Hagerstown. The location was selected
for long-distance testing at or beyond the suggested range limit of 225 km.
A "truth" site was established on Tangier Island, VA, and another
one, for safety, at Crisfield, MD. The Tangier Island site's coordinates were
determined based upon the raw data from Hagerstown (i.e., in post-mission mode).
With approximate coordinates for the island and the raw data for both the island
and the boat, researchers established a reference, or truth, trajectory for
the boat. This truth trajectory was then compared with the actual real-time
solution.
Figure 11 compares the actual real-time ellipsoidal height with the truth (good
to 5 cm or better). The boat rises about .3 m during its full speed motion from
Tangier Island to Crisfield and return.
For non-geodesists (concerned about a large negative height at sea), it should
be noted that the ellipsoid height system is quite different from the traditional
mean sea level height system. The former is a geometric height system, while
the latter is based upon gravity and determined by spirit leveling. At the extreme,
the two systems can disagree by more than ±100 m. As the following figures
indicate, the ellipsoidal height at the GPS antenna is approximately -33 m.
The ellipsoidal height of the water would be somewhere between -35 and -40 m.
Since the mean-sea level height is near zero, the two systems differ by roughly
40 m in the Chesapeake Bay.
Figure 11. Real-Time Versus Post-Processed Ellipsoidal Height
As figure 11 shows, the truth height and the real-time height were in good agreement
during the Tangier Island to Crisfield transit (i.e., 475625 to 477375) and
during the Crisfield to Tangier Island return (i.e., 491700 to 493700). The
height differences were largest at dockside. This may be a coincidence, as a
similar trend was not evident in the horizontal components.
Figure 12 compares the real-time "navigation" or kinematic solution
at the GPS antenna on the boat with the reference truth solution. The plot includes
north, east, and height envelopes, which represent the standard deviations output
from the DynaPos software. These envelopes are an intrinsic part of the kinematic
solution. Users would refer to these envelopes, because truth is not available
in day-to-day kinematic positioning.
The placement of a GPS antenna at a HA-NDGPS broadcast station may be more
important than has been the case for the current NDGPS network (i.e., for noise
reduction). The mean for the components was approximately 1 dm, and the standard
deviations are ±1 dm. It should be emphasized that there were moments
when errors in the broadcast orbits, coupled with weak geometry, yielded positioning
differences in excess of 1 dm when compared with precise orbits. Such was determined
in post-mission analysis, and these errors would be greatly reduced in multistation
mode.
Text Description
Figure 12. Real-Time Navigation Solution Compared to Post-Processed Solution
Figure 13 is similar to figure 12. The main differences are: the baseline was
45.8 km; the baseline was static treated as kinematic; and the mean after many
hours was treated as the reference truth, which generally is valid for many
hours of carrier processing at a static site.
Text Description
Figure 13. Dynamic Results on a Stationary Platform
During the late 1980s and the 1990s, scientists and engineers demonstrated that
GPS centimeter and decimeter kinematic methods work in post-mission mode. The
findings of this report demonstrate that GPS centimeter and decimeter methods
continue to work in real time based on the proposed HA-NDGPS architecture. Again,
the elements of the HA-NDGPS architecture are: dual use of existing infrastructure
(i.e., low cost); a low-frequency broadcast signal capable of reaching users
225 km from the NDGPS broadcast tower; aggressive data compression; a low-bandwidth
link; two-frequency (eventually three-frequency) GPS measurements; and subcentimeter
static and subdecimeter kinematic positioning results. This report's findings
suggest that the HA-NDGPS network would make these precise positioning signals
omnipresent, allowing existing complex and expensive methods to become simple
and inexpensive. This will make many advanced positioning scenarios more practical.
Figure 14 shows how much the proven methods will be impacted by the current
HA-NDGPS compression (i.e., the impact is negligible).
The chart does, in fact, demonstrate this.
Text Description
Figure 14. Error Due to Data Compression
As figure 14 shows, the selected compression mode has changed the measurement
data by a small amount, because the positioning results also have been changed
by a small amount, and there are no missing packets in this example. The compression
error contribution has been magnified by the appropriate dilution of precision
(DOP). Positioning would not necessarily be degraded by the amounts shown in
the graph above. First, compression errors are zero mean white processes and
are "friendly" errors. Second, one must "add" random errors
such as multipath, internal receiver errors, phase center wander, compression,
and so forth in a statistical sense. In other words, errors may cancel if averaged
over time. Additionally, different errors will affect the result differently,
generating an overall error that would look like white noise. Theoretically,
a totally random process can be modeled, and the randomness eliminated.
Missed data packets do have the potential to degrade high-precision positioning
performance, but missed data packets are nothing new. In fact, lost packets
are very common with today's low power radios. Also, there were very few lost
HA-NDGPS data packets (0.01 percent) at 45.8 km (inside an office), possibly
0.1-0.25 percent at 250 km, and approximately 2 percent at 250 km behind buildings
and structures.
Figure 15 depicts the effect of missing epochs. Here, DynaPos processes the
compressed data at Hagerstown before broadcasting (i.e., no missing packets)
with what the user receives (same data exactly except for missing packets).
While figure 14 presents the effect of compression alone, this figure shows
the effect on DynaPos on missing epochs, alone. This curve will look different
for each different real-time kinematic software used.
Text Description
Figure 15. Effects of Missing Epochs
7. Conclusions
The findings of this report indicate that the government-designed architecture
and system works very well. Results indicate that all current post-mission and
real-time carrier phase and code phase (single and dual) will work based upon
the HA-NDGPS broadcast signals with an imperceptible degradation in accuracy.
High-precision dual-frequency carrier and code data or equivalent can be broadcast
from NDGPS stations with a relatively tiny increment in cost to those facilities.
When comparing user-received data with the original raw receiver data, findings
indicate that, based on the chosen format, carrier phase data agrees to approximately
1 mm, and code phase agrees to approximately 4 mm.
While missed packets reside in the domain of GFE, there were very few missed
packets at 46 km. At 250 km, missed packets exceeded 1 percent when obstructions
existed, but missed packets were still relatively low when the receiver was
on the Chesapeake Bay, which was free of obstructions.
Appendix A-Phase I Participation Options
As stated at the NGDPS Workshop held in Silver Spring, MD on April 10, 2002,
the following are options for participation:
(1) Conduct data studies. Compare raw Hagerstown data (in RINEX) with a RINEX
translation of the data packets by GRIM into the modulator. Such a comparison
provides assurance that the data broadcast is almost identical to the original.
Compare RINEX translation of data broadcast with RINEX translation of data
received by a user. This would show two things. First, it would show that data
received is identical to data sent except for occasional missed packets as a
function of distance. Second, it would show that when a packet is missed, there
is no new carrier ambiguity across the gap, so tracking continuity is retained.
(2) Process these RINEX data to determine user positions.
(3) Request user equipment from FHWA or USCG. The equipment is expected
to become available soon.
(4) Participate by attending workshops and attempting to understand the
HA-NDGPS philosophy, goals, equipment, and obstacles.
(5) Contact Mr. Jim Arnold (FHWA) (202.493.3265 or james.a.arnold@dot.gov)
or Mr. Jim Radice (USCG/NAVCEN) (703.313.5860 or jradice@navcen.uscg.mil)
to discover other ways one can have a role in the HA-NDGPS experience.
Appendix B-Support of the System
Test and Analysis Program
for the NDGPS Modernization Program
This addendum clarifies how navigation accuracy was determined during the test
phase described in the report, Support of the System Test and Analysis Program
for the Nationwide Differential Global Positioning System Modernization Program,
so that readers may understand more fully the significance of the service as
tested.
Two reference station receivers and one rover were used throughout this test.
The first reference station receiver was located at the Hagerstown, MD, Nationwide
Differential Global Positioning System facility. Hagerstown housed the source
facility for the Global Positioning System (GPS) observables that were broadcast.
All data broadcast from the site was stored to be compared later with the received
data.
The second reference station receiver was located on Tangier Island, VA, in
the Chesapeake Bay. This site's location was developed based on received GPS
data and post-processing data from the (Continuously Operating Reference Station
(CORS) data at Hagerstown, MD. Data collected at this stationary site during
the test runs was stored for later processing.
The third receiver, the rover, was located on a mail and passenger boat that
departs at approximately 8 a.m. from Tangier Island, VA, travels to Crisfield,
MD, then returns to Tangier Island. The round trip lasts 8-9 hours. All data
collected from this receiver was stored to support future playback and to document
the broadcast's effectiveness.
To determine the "truth" navigation solution of the rover, the GPS
observables collected by the rover were post-processed using the data collected
at the Tangier Island reference station. This post-processing allowed researchers
to determine the rover's absolute position within 5 centimeters of its actual
position. This data then was compared to the real-time solution determined by
using the real-time broadcast from the High Accuracy-Nationwide Differential
Global Positioning System facility near Hagerstown, MD. The proximity of the
reference station on Tangier Island allowed researchers to determine the rover's
accuracy.
|


